香橙派-RKNN-Yolov5
香橙派-RKNN-Yolov5
环境说明
RKNN版本:1.4.0
香橙派系统环境:Ubuntu20
香橙派python版本:3.7
电脑系统环境:Ubuntu20
电脑python版本:3.8
硬件设备:香橙派5
所需源码
1 | https://github.com/rockchip-linux/rknn-toolkit2.git |
1 | https://github.com/rockchip-linux/rknpu2.git |
1 | https://github.com/ultralytics/yolov5.git |
RKNN 香橙派 部署
代码下载
1
2git clone https://github.com/rockchip-linux/rknn-toolkit2.git
git checkout v1.6.0查看RKNN 1.6.0版本支持的python版本
1
2
3
4
5
6
7
8ls rknn_toolkit_lite2/packages
# 结果
rknn_toolkit_lite2-1.6.0-cp310-cp310-linux_aarch64.whl
rknn_toolkit_lite2-1.6.0-cp37-cp37m-linux_aarch64.whl
rknn_toolkit_lite2-1.6.0-cp39-cp39-linux_aarch64.whl
rknn_toolkit_lite2-1.6.0-cp311-cp311-linux_aarch64.whl
rknn_toolkit_lite2-1.6.0-cp38-cp38-linux_aarch64.whl
rknn_toolkit_lite2_1.6.0_packages.md5sum我们可以使用python 3.7 到 3.11之间的任何版本。
安装python 3.7
1
2
3
4conda create -n py37 python=3.7
conda activate py37
pip install rknn_toolkit_lite2/packages/rknn_toolkit_lite2-1.6.0-cp37-cp37m-linux_aarch64.whl
pip install opencv-python运行测试程序
1
2cd rknn_toolkit_lite2/examples/dynamic_shape
python test.py运行结果
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16--> Load RKNN model
done
--> Init runtime environment
I RKNN: [11:16:18.618] RKNN Runtime Information: librknnrt version: 1.4.0 (a10f100eb@2022-09-09T09:07:14)
I RKNN: [11:16:18.618] RKNN Driver Information: version: 0.8.2
E RKNN: [11:16:18.618] 6, 1
E RKNN: [11:16:18.618] Invalid RKNN model version 6
E RKNN: [11:16:18.618] rknn_init, load model failed!
E Catch exception when init runtime!
E Traceback (most recent call last):
File "/opt/conda/envs/py37/lib/python3.7/site-packages/rknnlite/api/rknn_lite.py", line 148, in init_runtime
self.rknn_runtime.build_graph(self.rknn_data, self.load_model_in_npu)
File "rknnlite/api/rknn_runtime.py", line 919, in rknnlite.api.rknn_runtime.RKNNRuntime.build_graph
Exception: RKNN init failed. error code: RKNN_ERR_FAIL
Init runtime environment failed从运行的结果中
librknnrt version: 1.4.0,可以看出。我们的设备支持RKNN的1.4.0的版本
接下来,我们就安装RKNN1.4.0的版本。
RKNN 1.4.0版本安装
- 切换 RKNN 1.4.0版本
1
git checkout v1.4.0
- 支持的Python版本查看
1
2
3
4
5ls rknn_toolkit_lite2/packages
@结果 支持python 3.7与3.9
rknn_toolkit_lite2-1.4.0-cp37-cp37m-linux_aarch64.whl
rknn_toolkit_lite2-1.4.0-cp39-cp39-linux_aarch64.whl
rknn_toolkit_lite2_1.4.0_packages.md5sum - 安装Python3.7环境
1
2conda create -n py37 python=3.7
conda activate py37 - 安装rknn-toolkit_lite2
1
2pip install rknn_toolkit_lite2/packages/rknn_toolkit_lite2-1.4.0-cp37-cp37m-linux_aarch64.whl
pip install opencv-python - 测试安装效果
1
2# 没有出现报错,则安装成功
python -c "from rknnlite.api import RKNNLite"
RKNN PC Linux部署
由于香橙派上只能用1.4.0的版本,电脑上也用1.4.0的版本
- 下载指定tag的代码
1
2git clone https://github.com/rockchip-linux/rknn-toolkit2.git
git checkout v1.4.0 - 查看RKNN 1.6.0版本支持的python版本我们可以使用python 3.6 和 3.8的版本。
1
2
3
4
5ls packages/
# 结果
md5sum.txt
rknn_toolkit2-1.4.0_22dcfef4-cp36-cp36m-linux_x86_64.whl
rknn_toolkit2-1.4.0_22dcfef4-cp38-cp38-linux_x86_64.whl - 创建Python3.8的环境
1
2conda create -n py38 python=3.8
conda activate py38 - 安装rknn_toolkit2
1
pip install packages/rknn_toolkit2-1.4.0_22dcfef4-cp38-cp38-linux_x86_64.whl
- 运行yolov5例程目录下的
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23cd examples/onnx/yolov5
python test.py
# 结果
--> Export rknn model
done
--> Init runtime environment
W init_runtime: Target is None, use simulator!
done
--> Running model
Analysing : 100%|███████████████████████████████████████████████| 146/146 [00:00<00:00, 5137.71it/s]
Preparing : 100%|███████████████████████████████████████████████| 146/146 [00:00<00:00, 1165.36it/s]
W inference: The dims of input(ndarray) shape (640, 640, 3) is wrong, expect dims is 4! Try expand dims to (1, 640, 640, 3)!
done
class: person, score: 0.8223356008529663
box coordinate left,top,right,down: [473.26745200157166, 231.93780636787415, 562.1268351078033, 519.7597033977509]
class: person, score: 0.817978024482727
box coordinate left,top,right,down: [211.9896697998047, 245.0290389060974, 283.70787048339844, 513.9374527931213]
class: person, score: 0.7971192598342896
box coordinate left,top,right,down: [115.24964022636414, 232.44154334068298, 207.7837154865265, 546.1097872257233]
class: person, score: 0.4627230763435364
box coordinate left,top,right,down: [79.09242534637451, 339.18042743206024, 121.60038471221924, 514.234916806221]
class: bus , score: 0.7545359134674072
box coordinate left,top,right,down: [86.41703361272812, 134.41848754882812, 558.1083570122719, 460.4184875488281]yolov5s.rknn就是最后生成的模型。 - 适配3588模型
%%%%1
2
3
4# 239行
rknn = RKNN(verbose=True)
替换为
rknn = RKNN()1
2
3
4# 243行
rknn.config(mean_values=[128, 128, 128], std_values=[128, 128, 128])
替换为
rknn.config(mean_values=[128, 128, 128], std_values=[128, 128, 128], target_platform='rk3588')1
2
3
4# 272行
ret = rknn.init_runtime()
替换为
ret = rknn.init_runtime(target='rk3588') - 运行test.py,生成yolov5s.rknn
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18python test.py
# 结果
done
--> Export rknn model
done
--> Init runtime environment
I target set by user is: rk3588
I Starting ntp or adb, target is RK3588
I Start adb...
error: no devices/emulators found
E init_runtime: Connect to Device Failure (-1), Please make sure the USB connection is normal!
E init_runtime: Catch exception when init runtime!
E init_runtime: Traceback (most recent call last):
E init_runtime: File "rknn/api/rknn_base.py", line 1975, in rknn.api.rknn_base.RKNNBase.init_runtime
E init_runtime: File "rknn/api/rknn_runtime.py", line 194, in rknn.api.rknn_runtime.RKNNRuntime.__init__
E init_runtime: File "rknn/api/rknn_platform.py", line 331, in rknn.api.rknn_platform.start_ntp_or_adb
E init_runtime: Exception: Init runtime environment failed!
Init runtime environment failed! - 将yolov5s.rknn传到香橙派上
香橙派 运行yolov5
- 建立文件
deploy.py,将下面的内容写入文件中。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282import numpy as np
import cv2
from rknnlite.api import RKNNLite
RKNN_MODEL = 'yolov5s.rknn'
IMG_PATH = "bus.jpg"
QUANTIZE_ON = True
OBJ_THRESH = 0.25
NMS_THRESH = 0.45
IMG_SIZE = 640
CLASSES = ("person", "bicycle", "car", "motorbike ", "aeroplane ", "bus ", "train", "truck ", "boat", "traffic light",
"fire hydrant", "stop sign ", "parking meter", "bench", "bird", "cat", "dog ", "horse ", "sheep", "cow", "elephant",
"bear", "zebra ", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite",
"baseball bat", "baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup", "fork", "knife ",
"spoon", "bowl", "banana", "apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza ", "donut", "cake", "chair", "sofa",
"pottedplant", "bed", "diningtable", "toilet ", "tvmonitor", "laptop ", "mouse ", "remote ", "keyboard ", "cell phone", "microwave ",
"oven ", "toaster", "sink", "refrigerator ", "book", "clock", "vase", "scissors ", "teddy bear ", "hair drier", "toothbrush ")
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def xywh2xyxy(x):
# Convert [x, y, w, h] to [x1, y1, x2, y2]
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
return y
def process(input, mask, anchors):
anchors = [anchors[i] for i in mask]
grid_h, grid_w = map(int, input.shape[0:2])
box_confidence = sigmoid(input[..., 4])
box_confidence = np.expand_dims(box_confidence, axis=-1)
box_class_probs = sigmoid(input[..., 5:])
box_xy = sigmoid(input[..., :2])*2 - 0.5
col = np.tile(np.arange(0, grid_w), grid_w).reshape(-1, grid_w)
row = np.tile(np.arange(0, grid_h).reshape(-1, 1), grid_h)
col = col.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)
row = row.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)
grid = np.concatenate((col, row), axis=-1)
box_xy += grid
box_xy *= int(IMG_SIZE/grid_h)
box_wh = pow(sigmoid(input[..., 2:4])*2, 2)
box_wh = box_wh * anchors
box = np.concatenate((box_xy, box_wh), axis=-1)
return box, box_confidence, box_class_probs
def filter_boxes(boxes, box_confidences, box_class_probs):
"""Filter boxes with box threshold. It's a bit different with origin yolov5 post process!
# Arguments
boxes: ndarray, boxes of objects.
box_confidences: ndarray, confidences of objects.
box_class_probs: ndarray, class_probs of objects.
# Returns
boxes: ndarray, filtered boxes.
classes: ndarray, classes for boxes.
scores: ndarray, scores for boxes.
"""
boxes = boxes.reshape(-1, 4)
box_confidences = box_confidences.reshape(-1)
box_class_probs = box_class_probs.reshape(-1, box_class_probs.shape[-1])
_box_pos = np.where(box_confidences >= OBJ_THRESH)
boxes = boxes[_box_pos]
box_confidences = box_confidences[_box_pos]
box_class_probs = box_class_probs[_box_pos]
class_max_score = np.max(box_class_probs, axis=-1)
classes = np.argmax(box_class_probs, axis=-1)
_class_pos = np.where(class_max_score >= OBJ_THRESH)
boxes = boxes[_class_pos]
classes = classes[_class_pos]
scores = (class_max_score* box_confidences)[_class_pos]
return boxes, classes, scores
def nms_boxes(boxes, scores):
"""Suppress non-maximal boxes.
# Arguments
boxes: ndarray, boxes of objects.
scores: ndarray, scores of objects.
# Returns
keep: ndarray, index of effective boxes.
"""
x = boxes[:, 0]
y = boxes[:, 1]
w = boxes[:, 2] - boxes[:, 0]
h = boxes[:, 3] - boxes[:, 1]
areas = w * h
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x[i], x[order[1:]])
yy1 = np.maximum(y[i], y[order[1:]])
xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]])
yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]])
w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)
h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)
inter = w1 * h1
ovr = inter / (areas[i] + areas[order[1:]] - inter)
inds = np.where(ovr <= NMS_THRESH)[0]
order = order[inds + 1]
keep = np.array(keep)
return keep
def yolov5_post_process(input_data):
masks = [[0, 1, 2], [3, 4, 5], [6, 7, 8]]
anchors = [[10, 13], [16, 30], [33, 23], [30, 61], [62, 45],
[59, 119], [116, 90], [156, 198], [373, 326]]
boxes, classes, scores = [], [], []
for input, mask in zip(input_data, masks):
b, c, s = process(input, mask, anchors)
b, c, s = filter_boxes(b, c, s)
boxes.append(b)
classes.append(c)
scores.append(s)
boxes = np.concatenate(boxes)
boxes = xywh2xyxy(boxes)
classes = np.concatenate(classes)
scores = np.concatenate(scores)
nboxes, nclasses, nscores = [], [], []
for c in set(classes):
inds = np.where(classes == c)
b = boxes[inds]
c = classes[inds]
s = scores[inds]
keep = nms_boxes(b, s)
nboxes.append(b[keep])
nclasses.append(c[keep])
nscores.append(s[keep])
if not nclasses and not nscores:
return None, None, None
boxes = np.concatenate(nboxes)
classes = np.concatenate(nclasses)
scores = np.concatenate(nscores)
return boxes, classes, scores
def draw(image, boxes, scores, classes):
"""Draw the boxes on the image.
# Argument:
image: original image.
boxes: ndarray, boxes of objects.
classes: ndarray, classes of objects.
scores: ndarray, scores of objects.
all_classes: all classes name.
"""
for box, score, cl in zip(boxes, scores, classes):
top, left, right, bottom = box
print('class: {}, score: {}'.format(CLASSES[cl], score))
print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(top, left, right, bottom))
top = int(top)
left = int(left)
right = int(right)
bottom = int(bottom)
cv2.rectangle(image, (top, left), (right, bottom), (255, 0, 0), 2)
cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),
(top, left - 6),
cv2.FONT_HERSHEY_SIMPLEX,
0.6, (0, 0, 255), 2)
def letterbox(im, new_shape=(640, 640), color=(0, 0, 0)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im, ratio, (dw, dh)
if __name__ == '__main__':
# Create RKNN object
rknn = RKNNLite()
# load RKNN model
print('--> Load RKNN model')
ret = rknn.load_rknn(RKNN_MODEL)
# Init runtime environment
print('--> Init runtime environment')
ret = rknn.init_runtime(core_mask=RKNNLite.NPU_CORE_0_1_2) #使用0 1 2三个NPU核心
# ret = rknn.init_runtime('rk3566')
if ret != 0:
print('Init runtime environment failed!')
exit(ret)
print('done')
# Set inputs
img = cv2.imread(IMG_PATH)
# img, ratio, (dw, dh) = letterbox(img, new_shape=(IMG_SIZE, IMG_SIZE))
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = cv2.resize(img, (IMG_SIZE, IMG_SIZE))
# Inference
outputs = rknn.inference(inputs=[img])
# post process
input0_data = outputs[0]
input1_data = outputs[1]
input2_data = outputs[2]
input0_data = input0_data.reshape([3, -1]+list(input0_data.shape[-2:]))
input1_data = input1_data.reshape([3, -1]+list(input1_data.shape[-2:]))
input2_data = input2_data.reshape([3, -1]+list(input2_data.shape[-2:]))
input_data = list()
input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))
boxes, classes, scores = yolov5_post_process(input_data)
img_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if boxes is not None:
draw(img_1, boxes, scores, classes)
# show output
cv2.imshow("post process result", img_1)
cv2.waitKey(0)
cv2.destroyAllWindows()
rknn.release() - 运行程序
1
python deploy.py
- 结果展示
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18--> Load RKNN model
--> Init runtime environment
I RKNN: [13:00:34.125] RKNN Runtime Information: librknnrt version: 1.4.0 (a10f100eb@2022-09-09T09:07:14)
I RKNN: [13:00:34.125] RKNN Driver Information: version: 0.8.2
I RKNN: [13:00:34.125] RKNN Model Information: version: 1, toolkit version: 1.4.0-22dcfef4(compiler version: 1.4.0 (3b4520e4f@2022-09-05T20:52:35)), target: RKNPU v2, target platform: rk3588, framework name: ONNX, framework layout: NCHW
done
class: person, score: 0.8928694725036621
box coordinate left,top,right,down: [40.627504616975784, 235.50569766759872, 193.95716640353203, 534.8807769417763]
class: person, score: 0.878767728805542
box coordinate left,top,right,down: [531.5798395127058, 224.8939728140831, 639.2570745497942, 524.2690520882607]
class: person, score: 0.8309085965156555
box coordinate left,top,right,down: [174.62115895748138, 241.39454793930054, 273.0503498315811, 510.30296182632446]
class: person, score: 0.4691559970378876
box coordinate left,top,right,down: [0.81878662109375, 325.4185321331024, 54.147705078125, 517.9757549762726]
class: bicycle, score: 0.24984873831272125
box coordinate left,top,right,down: [530.9477665424347, 11.197928547859192, 597.0226924419403, 57.32749259471893]
class: bus , score: 0.5245066285133362
box coordinate left,top,right,down: [9.820066332817078, 131.40282291173935, 624.8392354249954, 430.7779021859169]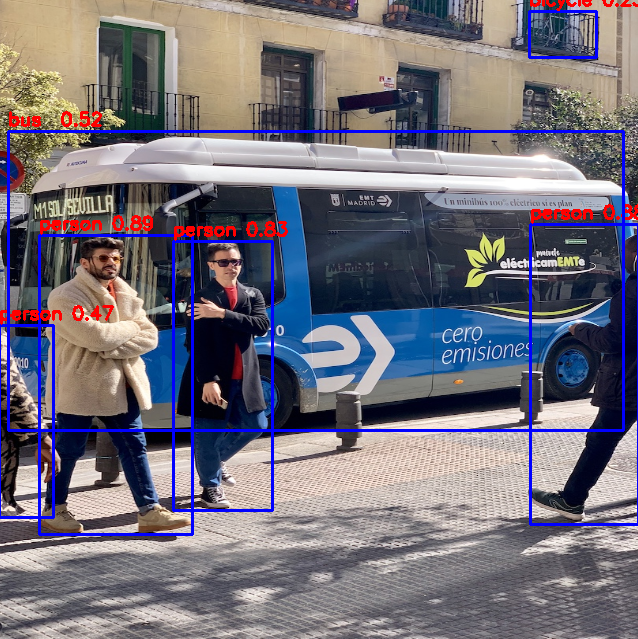
帮助文档
源码
https://github.com/rockchip-linux/rknpu2
https://github.com/rockchip-linux/rknn-toolkit2
https://github.com/ultralytics/yolov5ROC-RK3588-PC
https://wiki.t-firefly.com/zh_CN/ROC-RK3588-PC/usage_npu.html【边缘设备】yolov5训练与rknn模型导出并在RK3588部署~1.环境准备(亲测有效)
https://blog.csdn.net/zhoujinwang/article/details/132320665香橙派5 RK3588 yolov5模型转换rknn及部署踩坑全记录 orangepi 5
https://blog.csdn.net/m0_55217834/article/details/130583886

|

|
签名:Smile every day
名字:宏沉一笑
邮箱:whghcyx@outlook.com
个人网站:https://whg555.github.io
转载请注明来源,欢迎对文章中的引用来源进行考证,欢迎指出任何有错误或不够清晰的表达。可以在下面评论区评论,也可以邮件至 whghcyx@outlook.com
文章标题:香橙派-RKNN-Yolov5
文章字数:3k
本文作者:宏沉一笑
发布时间:2024-03-28, 10:36:30
最后更新:2024-03-30, 11:58:32
原始链接:https://whghcyx.gitee.io/2024/03/28/AI-2024-03-28-%E9%A6%99%E6%A9%99%E6%B4%BE-RKNN-Yolov5/版权声明: "署名-非商用-相同方式共享 4.0" 转载请保留原文链接及作者。

